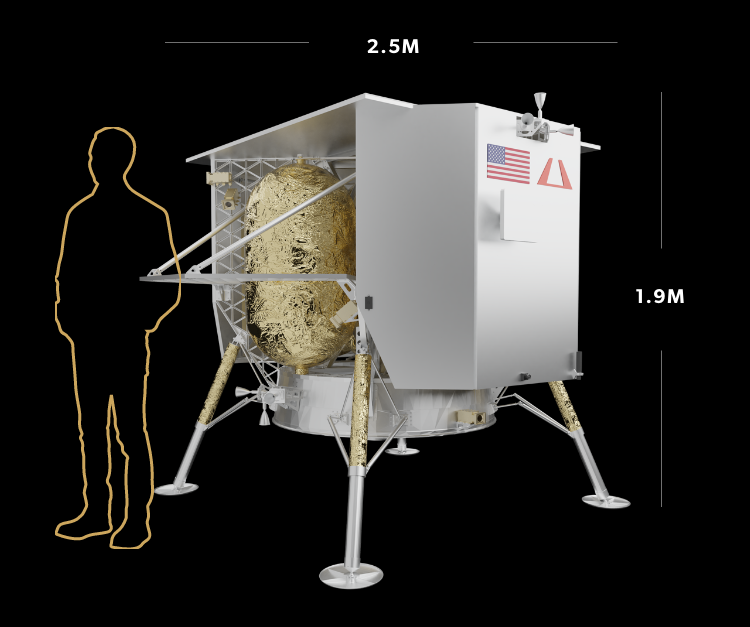
Peregrine Lander
The Peregrine Lander is designed to precisely and safely deliver payloads to lunar orbit and the lunar surface. Payloads can be mounted above or below the decks, inside or outside of enclosures, and can remain attached or deployed according to their needs.



Avionics
Peregrine’s avionics achieve terrestrial computing speed with high reliability. Rugged, radiation-tolerant computing enables autonomous landing and safety in the demanding space environment.

Structure
Peregrine’s structure is stout, stiff, and simple, allowing for easy payload integration. The configurable decks and enclosures accommodate payload-unique mounting and placement. Rover missions release from the underside of the deck, while BUS elements are housed inside the enclosures. Four legs absorb shock and stabilize Peregrine on touchdown.
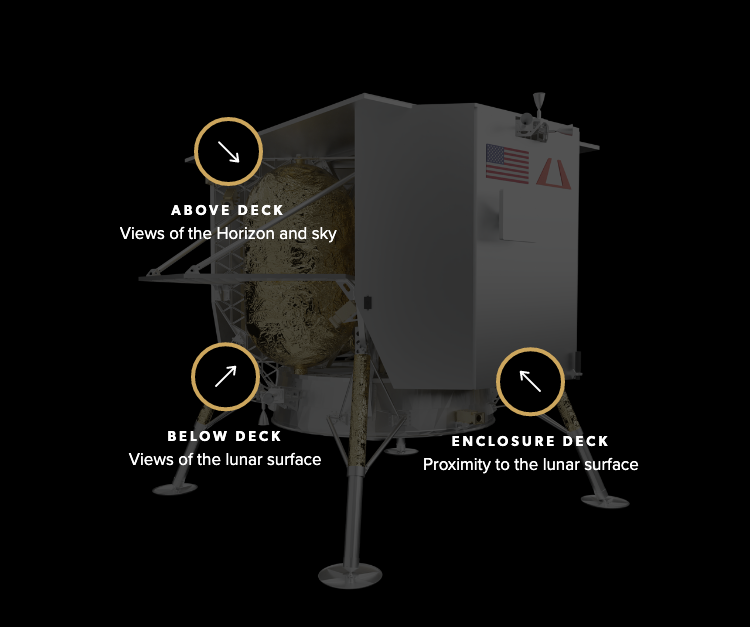
Payload Accommodations
Peregrine’s interface options accommodate a wide range of payload types on a single mission from companies, government, universities, non-profits, and individuals.
90KG Payload Mass Capacity

Above Deck
Views of the Horizon and sky

Below Deck
Views of the lunar surface

Enclosure Deck
Proximity to the lunar surface
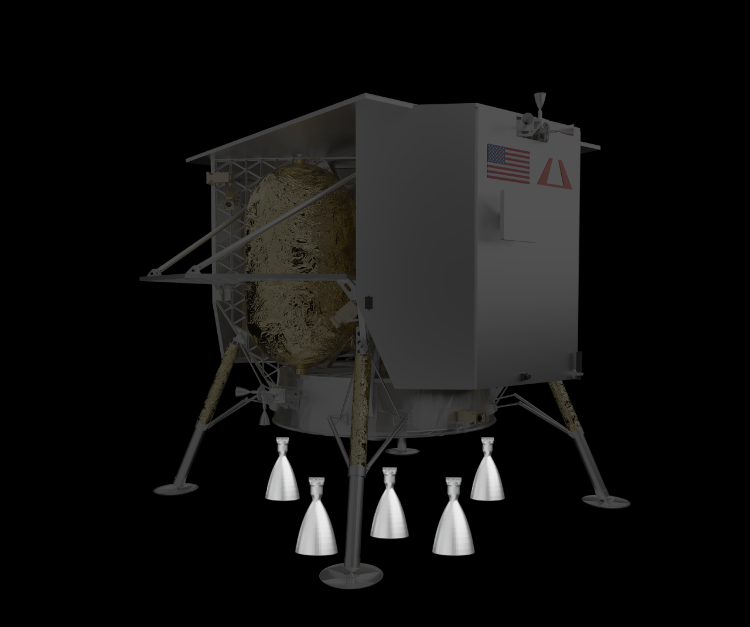
Propulsion
Peregrine uses a propulsion system featuring next generation space engine technology. Its five main engines perform all of the spacecraft’s major maneuvers, including trans-lunar injection, trajectory correction, lunar orbit insertion, and powered descent. Four clusters of attitude control thrusters maintain lander orientation throughout the mission.
3,300 N total thrust
MMH fuel
MON-25 oxidizer



Communications
Peregrine uses a high-powered, flight heritage transponder and a combination of low and medium gain antennas to relay data between the payload customer and their payload throughout the mission. The lander-payload connection is provided via Serial RS-422 or SpaceWire for wired communications and a WLAN modem for wireless communications with deployed payloads such as rovers.

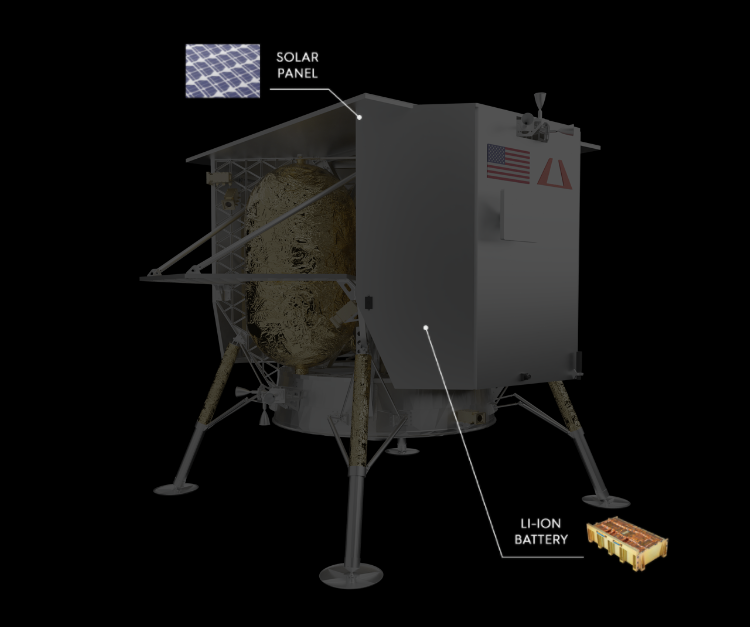
Power
Peregrine provides 28 volt operational and heater power to payloads throughout the mission. It uses a panel of triple-junction solar cells to generate power and a space-grade lithium-ion battery to store energy. The solar panel is pointed towards the Sun whenever possible to provide continuous power generation, while the battery is utilized when the Sun is not visible or for quick discharge activities.
GUIDANCE NAVIGATION & CONTROL
Peregrine’s GNC system uses heritage algorithms enhanced by recent developments in machine vision navigation. Off-the-shelf sensors and standard techniques provide reliability during cruise and lunar orbit, while Doppler LiDAR and Astrobotic’s proprietary terrain relative navigation (TRN) provide unprecedented precision during descent and landing. A scanning LiDAR can also be added to detect and avoid slopes, rocks, craters, and other hazards during landing.

Radio/Doppler
Sun Sensors
Star Tracker
Intertial Measurement
Precision Navigation
Doppler Lidar
Hazard Detection
